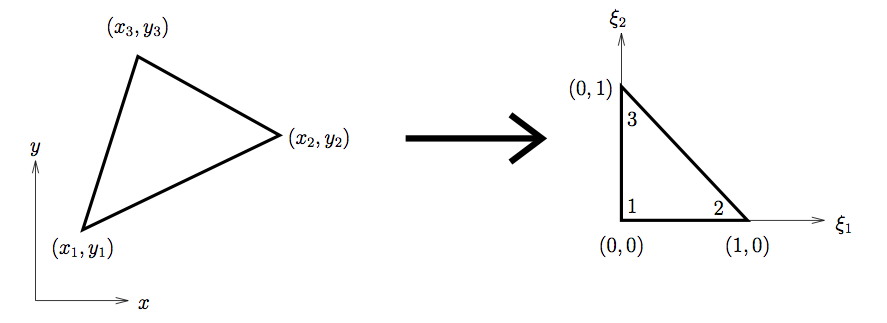
In multiple dimensions, a common practice in defining the polynomial functions within an element is to transform each element into a canonical, or so-called “reference" element. Figure 2.47 shows the mapping commonly used for triangular elements which maps a generic triangle in \((x,y)\) into a right triangle in \((\xi _1, \xi _2)\).
Figure 2.47: Transformation of a generic triangular element in \((x,y)\) into the reference element in \((\xi _1,\xi _2)\).
In the reference element space, the nodal basis for linear polynomials will be one at one of the nodes, and reduce linearly to zero at the other nodes. These functions are
Then, within the element, the solution \(\tilde{T}\) in the \((\xi _1,\xi _2)\) space is the combination of these three basis functions multiplied by the corresponding nodal coefficients,
Using Equation (2.265), the value of \(\tilde{T}\) can be found at any \((\xi _1,\xi _2)\). To find the \((x,y)\) locations in terms of the \((\xi _1, \xi _2)\), we can expand them using the nodal locations and the nodal basis functions, i.e.,
Since the \(\phi _ i(\xi _1,\xi _2)\) are linear functions of \(\xi _1\) and \(\xi _2\), this amounts to a linear transformation between \((\xi _1,\xi _2)\) and \((x,y)\). Specifically, substituting the nodal basis functions gives